ピッチブレンド blog
機械式計算機など。
2016年6月1日
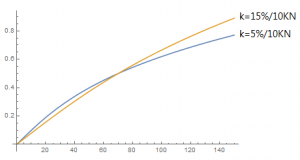
かなり間が空きましたが、『スラックラインの数理』2回目です。今回は、実際にスラックラインを張るときに役立つかもしれない話題、ラインの張力と沈み込み量の関係を見てみたいと思います。沈み込み量とは、ラインに人が乗ったときにラ …
続きを読む

最近のコメント